※bouncyではアフィリエイト広告を利用しています。記事で紹介した商品を購入すると、売上の一部がbouncyに還元されることがあります。
ドラえもんの手はどうやって物をつかんでいるんだろう? そんな疑問を抱いたことはありませんか? ロボット関連の展示会「World Robot Summit 2018 / Japan Robot Week 2018」で見つけた「柔軟ロボットハンド」がその答えになるのかもしれません。
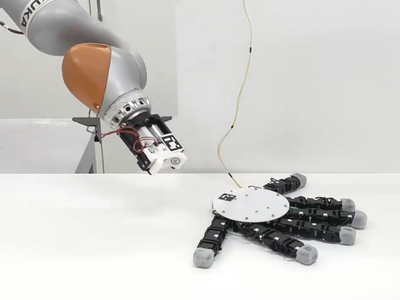
柔軟ロボットハンドは、刃物のように鋭利なものを含め、なんでもつかめてしまうというふれこみのロボットハンドです。フニャフニャとしたハンド部が物体を優しく包み込んだかと思えば、そのままつかめてしまいます。
刃物はもちろんのこと、破損して開かないバルブも優しく包んでひねって開く、そんなことだってできるんです。
仕組み
開発したのは東北大学の多田隈建二郎准教授。災害用ロボットのロボットハンドとして開発したもの。
その仕組みは三重構造のゴム膜にあります。真ん中の層に粉体を封入した袋状の構造。つかみたいものを包み、そのまま空気を抜いて減圧すると形を維持したまま固くなりつかめるようになる、というわけです。
例えば、サラサラとした小麦粉を想像してみてください。袋に入れて空気を抜いていけば、カチカチになるのは想像できますよね。この現象と同じことを利用してつかみます。
なお同様の仕組みを使うと、ビーズクッションのような構造でもつかめます。その場合、内部にも粉体があるため包み込めず、つかむのがより難しくなります。
また、ゴム膜は鋭利なものをつかむと切れてしまいます。このロボットハンドは表面を防刃生地で覆うことでこの問題をクリア
・ ・ ・
多田隈准教授によると、今回のロボットハンドは災害利用や産業廃棄物工場での利用を想定しているそうです。
また将来的な目標として、スペースデブリと呼ばれる地球の衛星軌道上を漂う宇宙のゴミ回収にも使えるのではないか、としています。宇宙では空気の代わりに流体を使い、優しく包みこみ減圧。そして固めてつかむ、を実現します。
宇宙空間を時速28,000kmで飛ぶスペースデブリは、宇宙開発にとって大きな問題になっています。もしかすると今回のなんでもつかめるロボットハンドがそんな問題もやさしく包み込んでくれるかもしれません。
東北大学