※bouncyではアフィリエイト広告を利用しています。記事で紹介した商品を購入すると、売上の一部がbouncyに還元されることがあります。
タコが海底を歩く姿や他の生物を捕食するシーンを見たことはないだろうか。8本の足はぐにゃぐにゃと信じがたいほど柔軟に動き、足の吸盤は一度相手を掴めば決して離さない。
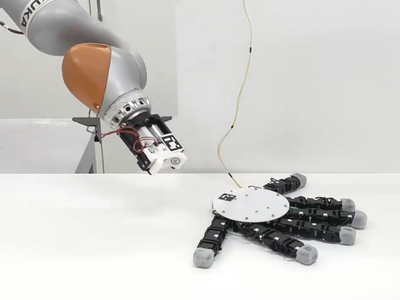
そんなタコ足の特性を取り入れて、ハーバード大学の研究者らによって開発された次世代型ロボットアームが「Octopus-inspired robot」だ。
これまでもタコ足を模倣したロボットは存在したが、複雑で滑らかな動きと吸盤の両機能を忠実に実装したものはこの「Octopus-inspired robot」が初と見られている。
アームはバルブで圧力をかけることによって、実際のタコ足とほぼ同じ角度で柔らかく曲がり、対象物がどんな形でも的確に掴み取る。さらにもう一つのバルブによって吸盤に負圧(真空)を発生させ、対象物を吸着させることができる。
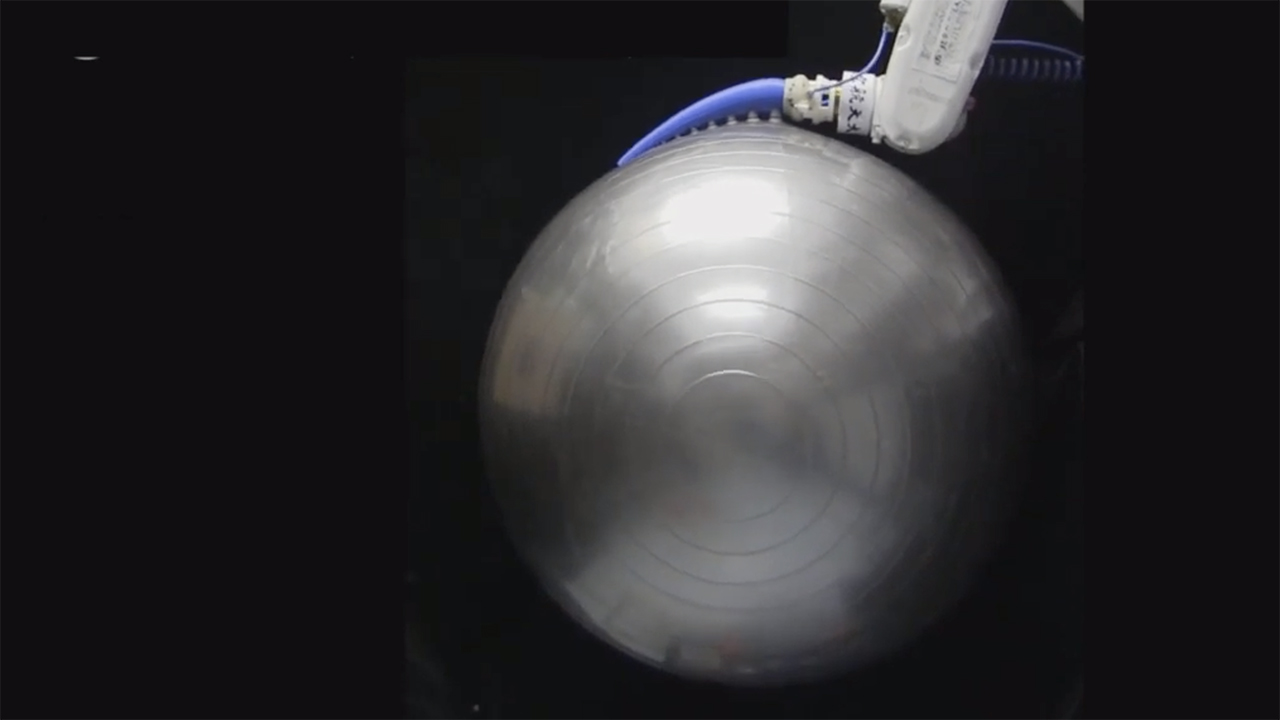
薄いプラスチックシートから重いマグカップ、割れやすい卵、生きているカニまでなんでも掴む。そして吸盤があるため、通常のロボットアームではまず持ち上げられないサイズの球体でも軽々と持ち上げるのだ。
・ ・ ・
ロボット開発で最も繊細な動きが求められるアーム。人間の手ではなくタコの足から開発の可能性が広がるとはなんとも興味深い。
Harvard John A. Paulson School of Engineering and Applied Sciences